Classification
| # of variables | # of modes | # of jumps |
|---|---|---|
| 2 | 4 | 7 |
| Type | Continuous dynamics | Guards & Invariants | Resets |
|---|---|---|---|
| hybrid | linear polynomial | hyperplane & half-space | identity |
Download
| Flow* | flow*_files |
| SpaceEx | spaceEx_files |
Model description
The considered benchmark presented in Fig.1(a) consists of two tanks. The liquid in the first tank comes from two outside sources: a constant inflow source and a second source equipped with a controlled valve valve1, with flows  and
and  respectively. A drain placed at the bottom of tank 1 allows the liquid to flow into tank 2 with flow
respectively. A drain placed at the bottom of tank 1 allows the liquid to flow into tank 2 with flow  .
.
Tank 2 is itself equipped with two drains. In the first one a pump is placed to assure a constant liquid outflow  whereas the flow in the second one
whereas the flow in the second one  is controlled by an electro-valve valve2.Both valves can take the states On/Off. This results consequently in four possible discrete modes for the hybrid automaton. The liquid levels in tank i is given by
is controlled by an electro-valve valve2.Both valves can take the states On/Off. This results consequently in four possible discrete modes for the hybrid automaton. The liquid levels in tank i is given by  .
.
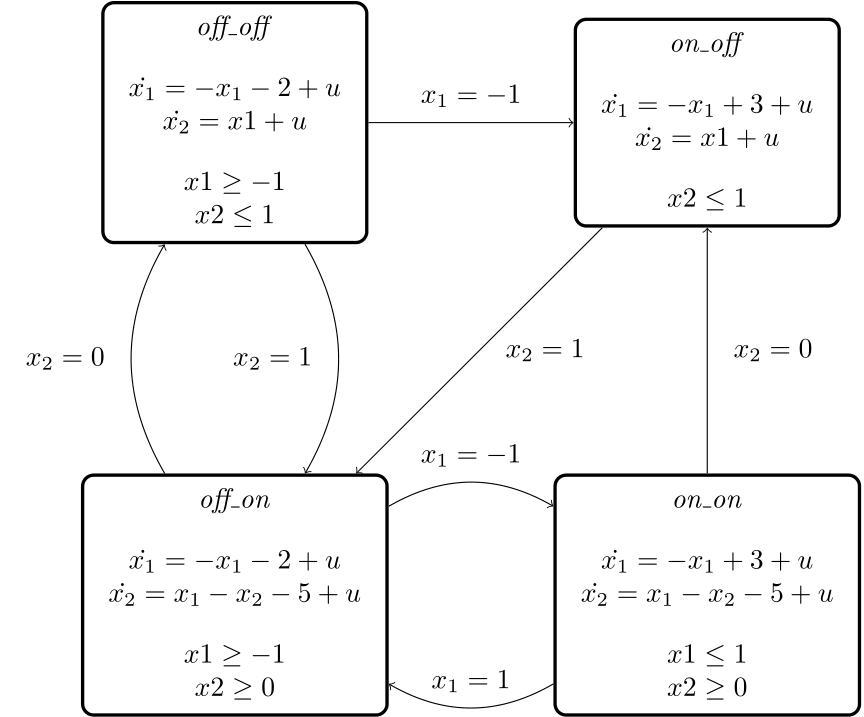
The dynamics of the above system is defined by the following differential equations:
![\[\dot{x}_1 = \left\{ \begin{array}{l l} -x_1-2 + [-0.1,0.1] & \quad \text{if $valve_1$ is Off}\\ -x_1+3 + [-0.1,0.1] & \quad \text{if $valve_1$ is On} \end{array} \right. \] \[\dot{x}_2 = \left\{ \begin{array}{l l} x_1+ [-0.1,0.1] & \quad \text{if $valve_2$ is Off}\\ x_1-x_2-5+ [-0.1,0.1] & \quad \text{if $valve_2$ is On} \end{array} \right. \]](https://ths.rwth-aachen.de/wp-content/ql-cache/quicklatex.com-ebde8389fd0fb2322e73dabc49f17130_l3.png "Rendered by QuickLaTeX.com")
Reachability settings
We consider an initial set of
![x_1 \in [1.5,2.5]](https://ths.rwth-aachen.de/wp-content/ql-cache/quicklatex.com-a308464b43a75eec11327fba9b5ca38e_l3.png "Rendered by QuickLaTeX.com")

and the starting location  , a time horizon
, a time horizon  , and a time step
, and a time step  . The set of bad states are all states, where
. The set of bad states are all states, where  .
.
Results
Fig.2 shows the flowpipes computed for the above-mentioned parameters using a) HyReach and b) SpaceEx. The results given in Fig. 2 show tightness difference between the two obtained flowpipes, although both proposed tools are based on the same reachability analysis technique using support functions.

Figure 2: Flowpipe of the two-tank system
References
[1] J. Lygeros. Lecture notes on hybrid systems. Technical Report, 2004.
[2] I. A. Hiskens. Stability of limit cycles in hybrid systems. In Proceedings of the 34th Hawaii International Conference on System Sciences (HICSS’01), pages 163-328, IEEE, 2001.
[3] A. Girard. Reachability of Uncertain Linear Systems Using Zonotopes. In Proceedings of the 8th International Workshop on Hybrid Systems: Computation and Control (HSCC’05), Volume 3414 of LNCS, pp 291-305, Springer, 2005.