Download
| Flow* | spring_pendulum.model |
Model description
We study the behavior of the planar spring-pendulum described in [1]. It consists of a solid ball of mass  and a spring of natural length
and a spring of natural length  . The spring constant is
. The spring constant is  .
.
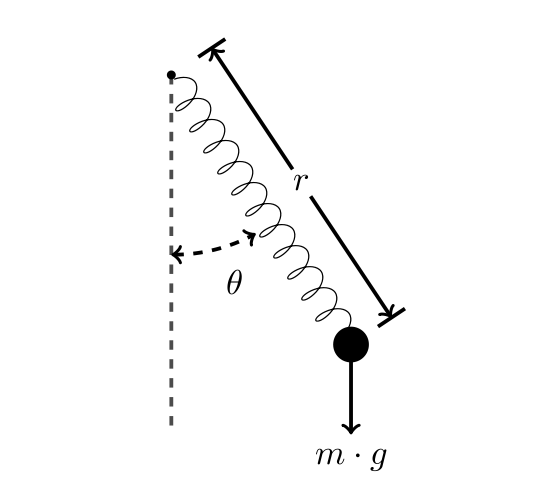
We study the evolutions of the length  of the spring and the angle
of the spring and the angle  between the spring and the vertical. They are modeled by the following differential equations
between the spring and the vertical. They are modeled by the following differential equations
![\[ \left\{ \begin{array}{lcl} m\cdot \ddot{r} & = & m\cdot r\cdot \dot{\theta}^2 + m\cdot g \cdot \cos(\theta) - k\cdot (r - L) \\ r^2 \cdot \ddot{\theta} & = & -2\cdot r\cdot \dot{r} \cdot \dot{\theta} - g\cdot r\cdot \sin(\theta) \end{array}\right. \]](https://ths.rwth-aachen.de/wp-content/ql-cache/quicklatex.com-6d4fc9f8e46b5f0650b977d3e97da4d4_l3.png "Rendered by QuickLaTeX.com")
which can be equivalently translated to the first-order ODE as below.
![\[ \left\{ \begin{array}{lcl} \dot{r} & = & v_r \\ \dot{\theta} & = & v_\theta \\ \dot{v}_r & = & r\cdot v_\theta^2 + g\cdot \cos(\theta) - k\cdot (r - L) \\ \dot{v}_\theta & = & -\frac{(2\cdot v_r \cdot v_\theta + g\cdot \sin(\theta))}{r} \\ \end{array} \right. \]](https://ths.rwth-aachen.de/wp-content/ql-cache/quicklatex.com-e58cd02ede3eeb3ba5b8ad2132df20ff_l3.png "Rendered by QuickLaTeX.com")
The constants are set as  ,
,  , and
, and  .
.
Reachability settings
We consider the initial set ![r\in [1.19,1.21]](https://ths.rwth-aachen.de/wp-content/ql-cache/quicklatex.com-ccee2dfb05729d3fe9aea9bc2a326aac_l3.png "Rendered by QuickLaTeX.com") ,
, ![\theta\in [0.49,0.51]](https://ths.rwth-aachen.de/wp-content/ql-cache/quicklatex.com-0c1c35bacc0b0087a3339a9dc5a60cac_l3.png "Rendered by QuickLaTeX.com") ,
,  and
and  .
.
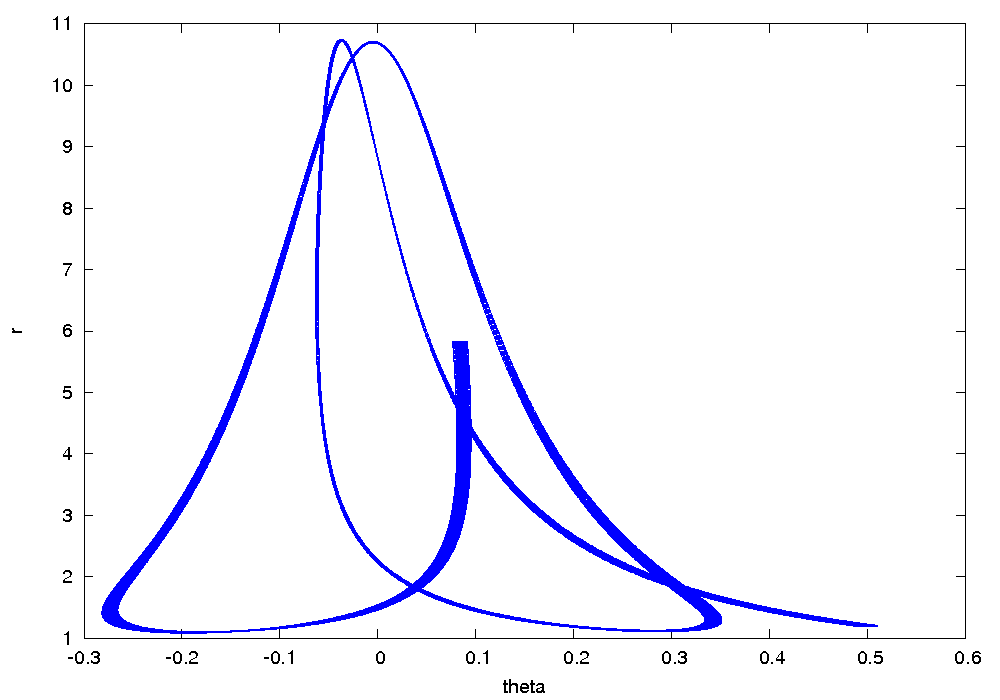
Results
The following figure shows an overapproximation computed by Flow* for the time horizon ![[0,10]](https://ths.rwth-aachen.de/wp-content/ql-cache/quicklatex.com-bcc812ae02572be8e4c4ed66b0e18ed5_l3.png "Rendered by QuickLaTeX.com") .
.