Model description
The general dynamics of the model of spiking neurons is defined by the following ODE.
![\[ \left\{ \begin{array}{rcl} C\cdot \dot{v} & = & k\cdot (v - v_r) \cdot (v - v_t) - u + I \\ \dot{u} & = & a\cdot (b\cdot (v - v_r) - u) \end{array} \right. \]](https://ths.rwth-aachen.de/wp-content/ql-cache/quicklatex.com-70118fbaffb72328140d54ab06b18e4f_l3.png "Rendered by QuickLaTeX.com")
wherein the constant parameters are given by  ,
,  ,
,  ,
,  ,
,  ,
,  and
and  . The values of
. The values of  ,
,  are reset to
are reset to  and
and  respectively when
respectively when  .
.
Reachability setting
We consider the initial set defined by ![v \in [-50.5,-49.5]](https://ths.rwth-aachen.de/wp-content/ql-cache/quicklatex.com-f98fb7e1e0b5b61ca10be335f666b480_l3.png "Rendered by QuickLaTeX.com") ,
, ![u \in [-0.5,0.5]](https://ths.rwth-aachen.de/wp-content/ql-cache/quicklatex.com-80b2eac3fdedb6121d2f7392309258b4_l3.png "Rendered by QuickLaTeX.com") .
.
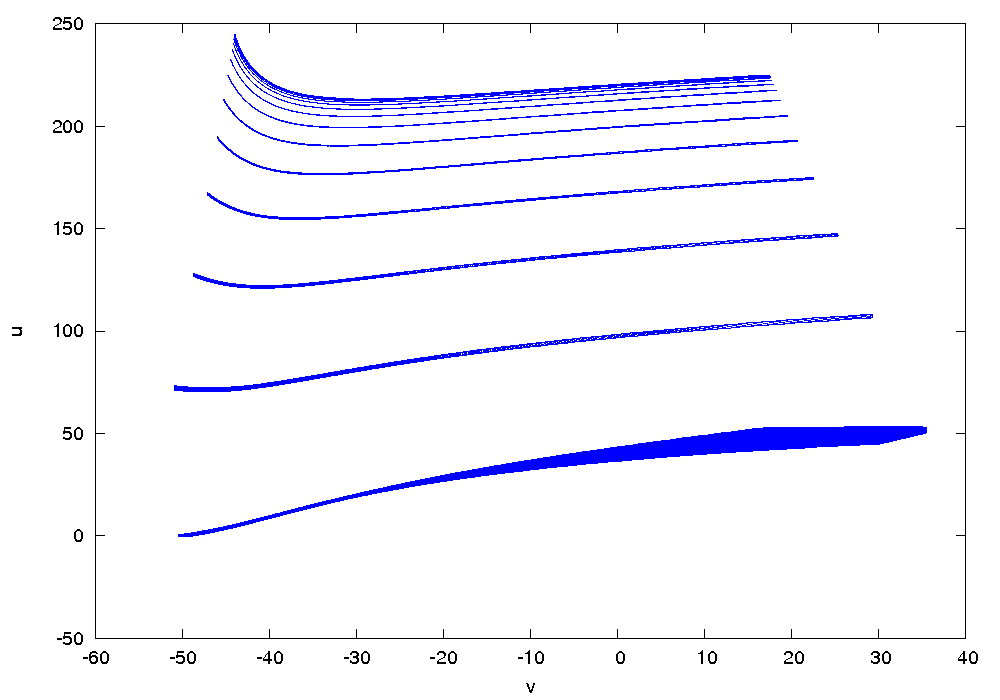
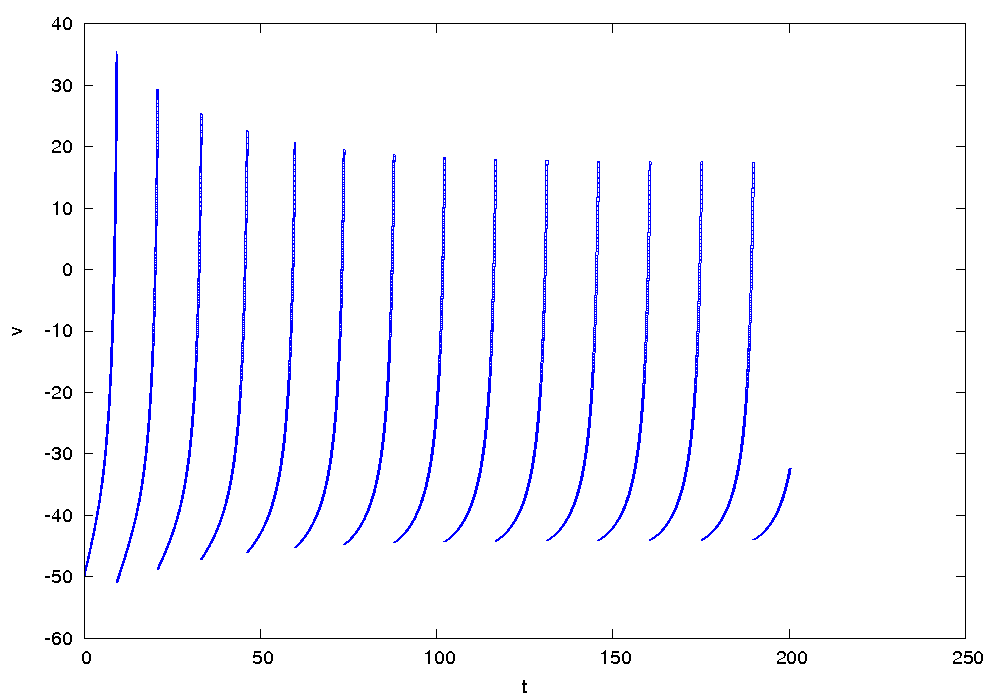
Result
The following figures show an overapproximation computed by Flow* for the time horizon ![[0,200]](https://ths.rwth-aachen.de/wp-content/ql-cache/quicklatex.com-2e8f3c9781d1317852220527ac9aa4a3_l3.png "Rendered by QuickLaTeX.com") .
.