Download
| Flow* | vehicle_platoon_5 vehicle_platoon_10 |
| SpaceEx | 5_vehicles, 10_vehicles |
Model description
The proposed benchmark consists of  autonomously-driven vehicles. These vehicles follow longitudinally a leader located at the head of the formation. The collaboration process is realized by networking the vehicles inside the platoon via a communication network. In this example, the vehicles exchange information about their relative positions, their relative velocities as well as their actual accelarations measured with on-board sensors via a wireless communication network.
autonomously-driven vehicles. These vehicles follow longitudinally a leader located at the head of the formation. The collaboration process is realized by networking the vehicles inside the platoon via a communication network. In this example, the vehicles exchange information about their relative positions, their relative velocities as well as their actual accelarations measured with on-board sensors via a wireless communication network.
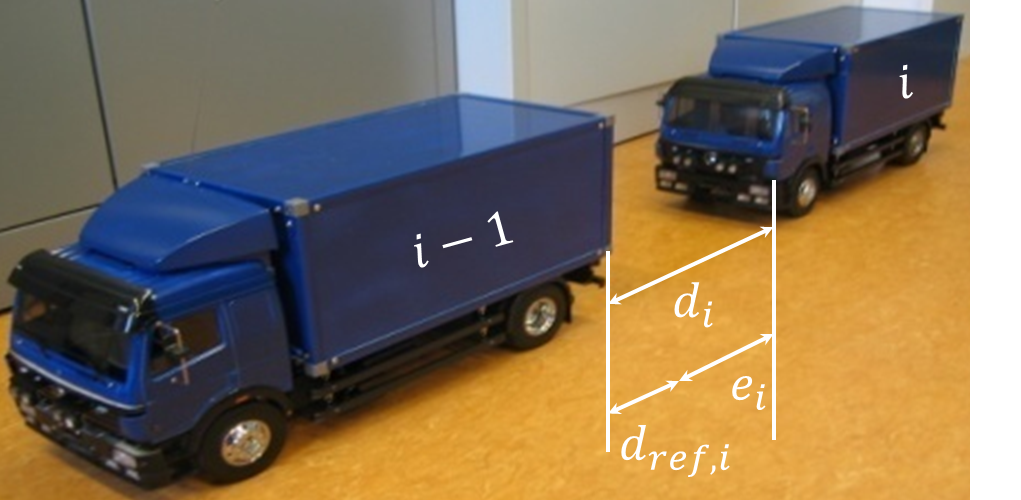
Fig.1: The relative position between vehicles inside the platoon.
The relative position  of vehicle
of vehicle  is defined as the difference between the distance
is defined as the difference between the distance  to its predecessor and a reference distance
to its predecessor and a reference distance  (see fig.1).
(see fig.1).
(1) 
The relative velocity of vehicle is the derivative of its relative position  and the accelaration is defined as
and the accelaration is defined as  .
.
Each vehicle inside the platoon will be then described by the state vector ![x_i = [e_i, \dot{e_i}, a_i]](https://ths.rwth-aachen.de/wp-content/ql-cache/quicklatex.com-d2410f7986187319b548b07f441559c8_l3.png "Rendered by QuickLaTeX.com") . In case of a five vehicle longitudinal formation, the state vector takes this form
. In case of a five vehicle longitudinal formation, the state vector takes this form ![x = [e_1, \dot{e_1}, a_1, e_2, \dot{e_2}, a_2, e_3, \dot{e_3}, a_3, e_4, \dot{e_4}, a_4, e_5, \dot{e_5}, a_5]](https://ths.rwth-aachen.de/wp-content/ql-cache/quicklatex.com-733e6aa9145d64a6444d994f1b875795_l3.png "Rendered by QuickLaTeX.com") .
.
The control design aims firstly at stabilizing the controlled platoon while assuring minimum relative distances and secondly at guaranteeing a quick response to disturbances but with bounded oscillations and overshoots. The main goal thereby is to avoid collisions inside the platoon. These objectives can be expressed as a norm 2 (H2) optimization problem. Details can be found in [1,2,3].
In addition, a particular control design objective related to the nature of this application, the so-called string stability, must be also taken in consideration. The string stability assures the attenuation of the relative distance while moving from the head of the platoon to its bottom. This is generally formulated as a norm infinity (H infinity) optimization problem [1,2,3].
For the sake of simplicity, the control design considered here does not take account of the previous condition. However, this last will be verified using reachability analysis after computing the closed loop system obtained by solving just the H2 optimization problem.
In addition to the previous goal, reachability analysis will be particularly used to determine a lower bound for which guarantees a collision-free drinving.
We suppose, in this case that there is communication between all the vehicles so that relevant information for control is always available. The controlled platoon can be then modeled as a hybrid automaton with a unique location. The invariant is the whole state space and the flow is given by the dynamics of the closed loop system described by the following linear differential equation
(2) 
where  is a constant system matrix,
is a constant system matrix,  is a constant input matrix and
is a constant input matrix and  the acceleration of the leader considered here as an uncertain input [1,2].
the acceleration of the leader considered here as an uncertain input [1,2].
The matrices resulting from the solution of the control problem for  and
and  vehicles can be obtained as csv files 5_vehicle_dynamic and 10_vehicle_dynamic.
vehicles can be obtained as csv files 5_vehicle_dynamic and 10_vehicle_dynamic.
Reachability settings
Setting in the model files
All variables are initially set to be in the interval ![[0.9;1.1]](https://ths.rwth-aachen.de/wp-content/ql-cache/quicklatex.com-b57b58629af695530eef8965568f86aa_l3.png "Rendered by QuickLaTeX.com") . The stepsize is set to
. The stepsize is set to  and the time horizon
and the time horizon  . The set of bad states are the states, where
. The set of bad states are the states, where ![x1 \in [-0.5,-0.2]](https://ths.rwth-aachen.de/wp-content/ql-cache/quicklatex.com-15b357d857827858aed83e95c12833bf_l3.png "Rendered by QuickLaTeX.com") .
.
Additional possible settings
The computation can start with the origin  or with a neighborhood of the origin. The maximum allowed uncertain input set is
or with a neighborhood of the origin. The maximum allowed uncertain input set is ![[-9,1]m s^{-2}](https://ths.rwth-aachen.de/wp-content/ql-cache/quicklatex.com-88077d3117774e397429b5dafea24220_l3.png "Rendered by QuickLaTeX.com") .
.
We aim first to verify if under such a large uncertainty in the input the string stability is hold or not. That means if:
(3) 
We are then interested in finding the shortest gaps  ,
,  ,
,  ,
,  ,
,  within the platoon which correspond to the lower bounds of the reachable set in the corresponding directions of the canonical basis.
within the platoon which correspond to the lower bounds of the reachable set in the corresponding directions of the canonical basis.
Results
Results of the 5 vehicle platoon gained from SpaceEx:

Results of the 10 vehicle platoon gained from SpaceEx:

References
[1] J.P. Maschuw, Platoon Control and Reconfiguration Based on Linear Matrix Inequalities, In: Fortschritt-Berichte VDI, Reihe 8, Mess-, Steuerungs- und Regelungstechnik, volume 1216, ISBN 978-3-18-521608-4, 2012.
[2] J. Maschuw and D. Abel, Longitudinal vehicle guidance in networks with changing communication topology. In AAC 2010, IFAC-Symposium Advances in Automotive Control, München, 2010.
[3] J. Maschuw, and G. Keler, and D. Abel, LMI based control of vehicle platoons for robust longitudinal guidance. In IFAC World Congress, Seoul, 2008.