Classification
| # of variables | # of modes | # of jumps |
|---|---|---|
| 9 | 2 | 2 |
| Type | Continuous dynamics | Guards & Invariants | Resets |
|---|---|---|---|
| hybrid | linear polynomial | half-space | constant |
Download
| Flow* | vehicle_platoon_3.zip |
| SpaceEx | 3_vehicle_platoon.zip |
Model description
We consider the platoon of  vehicles guided by a leader illustrated in Fig.1.
vehicles guided by a leader illustrated in Fig.1.
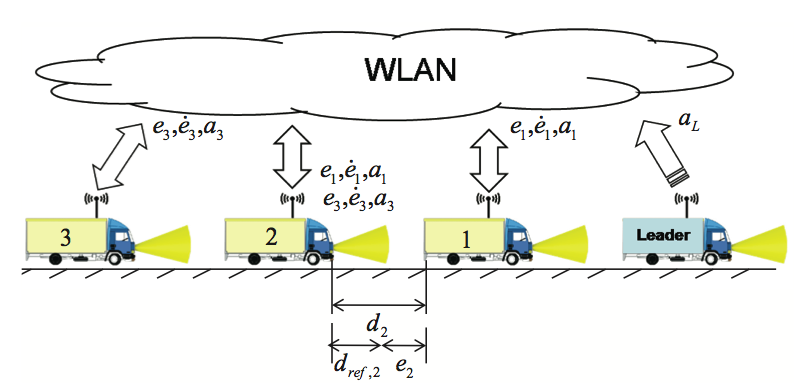
Figure 1: WLAN cooperative platoon with three vehicles and a leader ahead.
The spacing error  is defined as the difference between the distance
is defined as the difference between the distance  of the truck
of the truck  to its predecessor and a reference distance
to its predecessor and a reference distance  .
.
(1) 
The goal of the reachability analysis for this system is to determine a lower bound for assuring collision-free driving.
The dynamics of the platoon is described by the following differential equation
(2) 
where  is a constant system matrix,
is a constant system matrix,  is a constant input matrix and
is a constant input matrix and  the acceleration of the leader considered here as an uncertain input [1,2].
the acceleration of the leader considered here as an uncertain input [1,2].
The state vector is ![x = [e_1, \dot{e_1}, a_1, e_2, \dot{e_2}, a_2, e_3, \dot{e_3}, a_3]](https://ths.rwth-aachen.de/wp-content/ql-cache/quicklatex.com-aa16fb97df2e1c92c05d820984e4662b_l3.png "Rendered by QuickLaTeX.com") where
where  is the acceleration of vehicle .
is the acceleration of vehicle .
In case of no communication problems, these matrices are given as follows
(3) 
In case of total disruption of the communication, the matrices describing the system are given by
(4) 
The platoon is modelled as a hybrid automaton. Its continuous dynamics constitute thereby the continuous states. The communication breakdowns, however, trigger the discrete switches from one continuous state to another. We consider the following hybrid automata describing the worst case scenario of a hazard loss of communication between all members of the platoon.
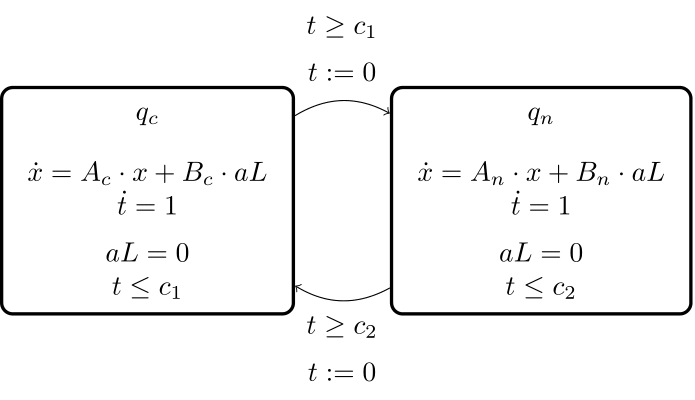
Discrete switches can be modelled as spontaneous, true or guard free transitions (Fig.2(a)) [3]. Otherwise, a clock can be added making therefore the switching dependent on time (Fig.2(b)).
Alternatively, switching can be forced if the algorithm computing the reachable set attains a fix point. That corresponds, in this context, to an invariant reachable set. Simulations during the control design help to determine the time horizon  after which the controlled system reaches a stable state. For our case study, we have
after which the controlled system reaches a stable state. For our case study, we have  .
.
In this example, the sets  and
and  corresponding respectively to the state space domains of the continuous states
corresponding respectively to the state space domains of the continuous states  and
and  are taken, for this particular application, equal to
are taken, for this particular application, equal to  . Otherwise the user is free to make a different but suitable choice. Furthermore, the decision on the values of the time constants
. Otherwise the user is free to make a different but suitable choice. Furthermore, the decision on the values of the time constants  and
and  of the hybrid model in Fig.2(b) is also left to the user.
of the hybrid model in Fig.2(b) is also left to the user.
Reachability settings
The initial set is specified by
![e_i \in [0.9,1.1], i\in{1,\ldots,3}](https://ths.rwth-aachen.de/wp-content/ql-cache/quicklatex.com-5f535673591f73eee9d1ba1ca0f3df7d_l3.png "Rendered by QuickLaTeX.com")
![\dot{e_i} \in [0.9,1.1], i\in{1,\ldots,3}](https://ths.rwth-aachen.de/wp-content/ql-cache/quicklatex.com-7d145f2736dbf3aafc2777d5b4d39631_l3.png "Rendered by QuickLaTeX.com")
![a_i \in [0.9,1.1], i\in{1,\ldots,3}](https://ths.rwth-aachen.de/wp-content/ql-cache/quicklatex.com-c15541da534c52ef4154064d7a1d4b61_l3.png "Rendered by QuickLaTeX.com")

- The uncertain input for this setup was set to

The initial location is  and the time horizon is set to
and the time horizon is set to  . The set of bad states are the states where
. The set of bad states are the states where  .
.
Results
Results gained with SpaceEx:
References
[1] I. Ben Makhlouf, J.P. Maschuw, P. Hänsch, H. Diab, S. Kowalewskiand, D. Abel. Safety Verification of a Cooperative Vehicle Platoon with Uncertain Inputs Using Zonotopes. In Proceedings of the 18th International Federation of Automatic Control World Congress (IFAC’11), pages 9769-9774, Elsevier, 2011.
[2] I. Ben Makhlouf, H. Diab, S. Kowalewski. Safety Verification of a Controlled Cooperative Platoon Under Loss of Communication Using Zonotopes. In Proceedings of the 4th IFAC Conference on Analysis and Design of Hybrid Systems (ADHS’12), pages 333-338, Elsevier, 2012.
[3] I. Ben Makhlouf, and P. Hänsch, S. Kowalewski. Comparison of Reachability Methods for Uncertain Linear Time-Invariant Systems. In Proceedings of the European Control Conference 2013 (ECC’13), pages 1101- 1106, IEEE, 2013.
[4] J.P. Maschuw. Platoon Control and Reconfiguration Based on Linear Matrix Inequalities. In Fortschritt-Berichte VDI. Reihe 8, Mess-, Steuerungs- und Regelungstechnik, Volume 1216, VDI, 2012.
[5] J. Maschuw, D. Abel. Longitudinal vehicle guidance in networks with changing communication topology. In Proccedings of IFAC-Symposium Advances in Automotive Control (AAC’10), pages 785-790, Elsevier, 2010.
[6] J. Maschuw, G. Keler, D. Abel. LMI based control of vehicle platoons for robust longitudinal guidance. In IFAC World Congress, Volume 17, pages 12111-12116, Elsevier, 2008.