Classification
| # of variables | # of modes | # of jumps |
|---|---|---|
| 5 | 5 | 5 |
| Type | Continuous dynamics | Guards & Invariants | Resets |
|---|---|---|---|
| hybrid | linear polynomial | none | constant |
Download
| Flow* | switching_5.zip |
| SpaceEx | 5_dim_linear_switch.zip |
Model description
It is a piecewise linear system with different controlled continuous dynamics. The matrices  describing the modes of the hybrid system are generated randomly by using the rss() Matlab function. The generated systems are then stabilized with an LQR controller to garantee a convergence to a stable attracting region. The transitions are determined heuristically by means of simulations.
describing the modes of the hybrid system are generated randomly by using the rss() Matlab function. The generated systems are then stabilized with an LQR controller to garantee a convergence to a stable attracting region. The transitions are determined heuristically by means of simulations.
The proposed benchmark consists of 5 modes und 5 transitions. The continuous dynamics in each mode  is described by the following ODE:
is described by the following ODE:
![\[ \dot{x} = A_i x+B_i u \]](https://ths.rwth-aachen.de/wp-content/ql-cache/quicklatex.com-34a0892318cd2710a625144160bdd96c_l3.png "Rendered by QuickLaTeX.com")
where  is the state vector,
is the state vector,  is an input signal confined in compact bounded set
is an input signal confined in compact bounded set  and
and
 ,
,
 ,
,
 ,
,
 ,
,
 ,
,
 ,
,
The corresponding hybrid automaton is given in fig.1.
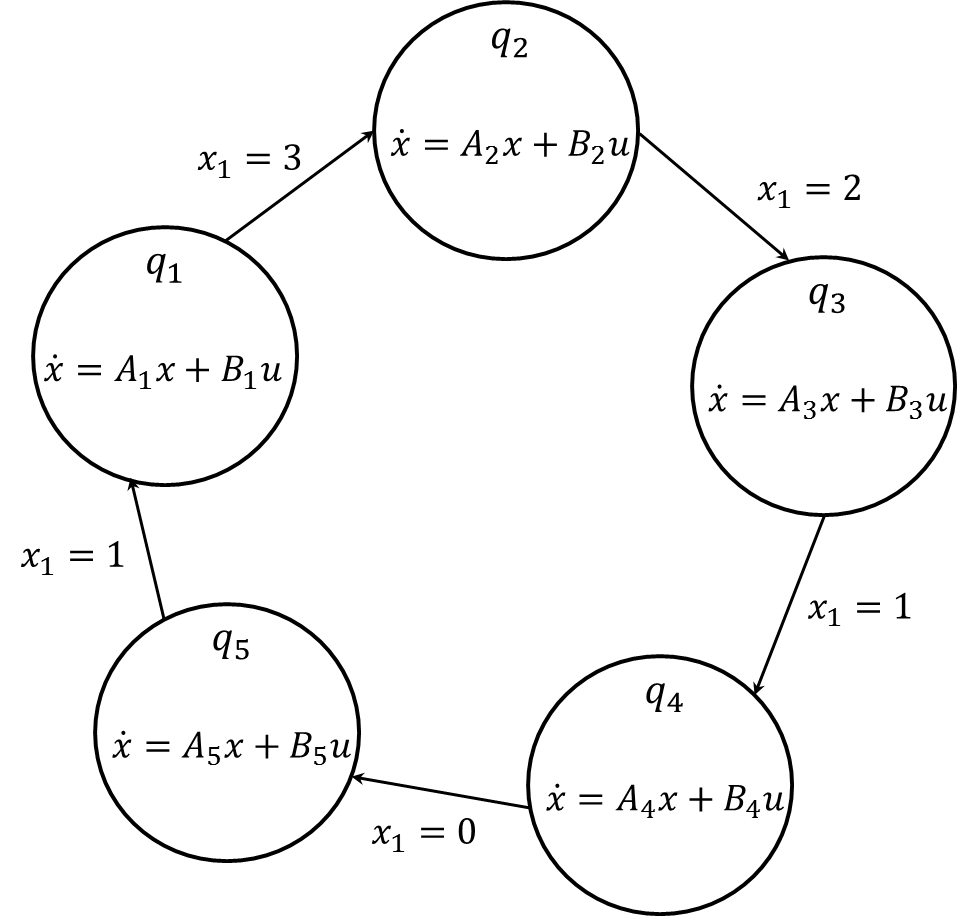
Fig.1: Hybrid automaton of the benchmark.
Reachability settings
We use the initial set

![u \in[-1,1]](https://ths.rwth-aachen.de/wp-content/ql-cache/quicklatex.com-19b23b279bcc4631bf94f37e5b359d88_l3.png "Rendered by QuickLaTeX.com")
with the initial location  . The time horizion is set to
. The time horizion is set to  .
.
Results
SpaceEx results for a time horizon  and box directions :
and box directions :