Classification
| # of variables | # of modes | # of jumps |
|---|---|---|
| n | 3 | 2 |
| Type | Continuous dynamics | Guards & Invariants | Resets |
|---|---|---|---|
| hybrid | non-polynomial | linear polynomial | identity |
Note: The class of the benchmarks is determined by the input  .
.
Download
| Flow* n=2 | line_circuit_2.model |
| Flow* n=2 | line_circuit_4.model |
| Flow* n=2 | line_circuit_6.model |
| Flow* n=2 | line_circuit_8.model |
| Flow* n=2 | line_circuit_10.model |
| Flow* n=2 | line_circuit_12.model |
Model description
We study a non-linear resistor circuit which is shown in the figure below.
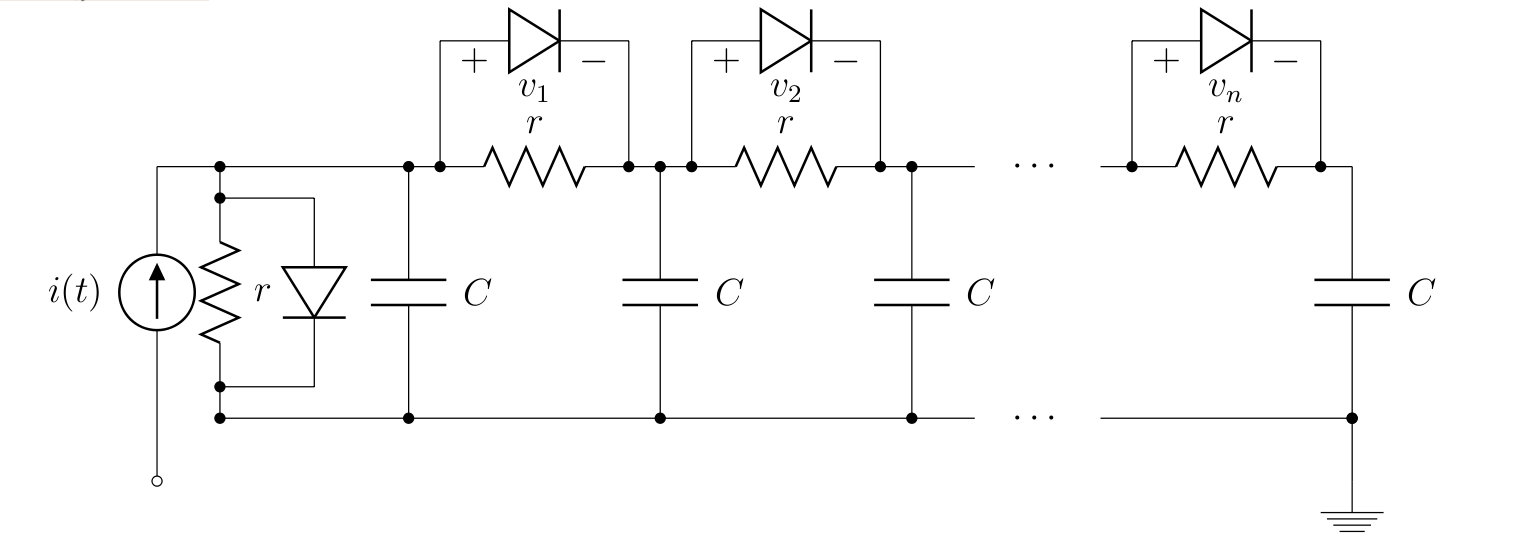
The circuit is composed of  non-linear resistors and the same number of capacitors. Each non-linear resistor consists of a diode and a unit resistor (
non-linear resistors and the same number of capacitors. Each non-linear resistor consists of a diode and a unit resistor ( ). For simplicity, we assume that all capacitors have unit capacitance
). For simplicity, we assume that all capacitors have unit capacitance  . For each diode, the I-V characteristic is given by
. For each diode, the I-V characteristic is given by  . The value of
. The value of  is
is  in the original model, but we set it as
in the original model, but we set it as  to relieve the stiffness of the behavior. The current source in the figure is the input, and
to relieve the stiffness of the behavior. The current source in the figure is the input, and  is the single output of the circuit. Therefore, the whole circuit system can be described by the following ODE.
is the single output of the circuit. Therefore, the whole circuit system can be described by the following ODE.

Scalable continuous and hybrid benchmarks can be built based on the circuit according to the size  and various types of the input. Here, we consider a discontinuous input which is defined by
and various types of the input. Here, we consider a discontinuous input which is defined by
![\[ i(t) = \left\{ \begin{array}{ll} 2, & t\leq 1 \\ 3 - t, & 1 < t \leq 2 \\ 1, & t > 2 \end{array} \right. \]](https://ths.rwth-aachen.de/wp-content/ql-cache/quicklatex.com-46cefed58a7634685344f9a4da306395_l3.png "Rendered by QuickLaTeX.com")
Reachability settings
The initial set under consideration is defined by ![v_i \in [0,0.02]](https://ths.rwth-aachen.de/wp-content/ql-cache/quicklatex.com-8110bd542049e24b32e3578b4e5eb5f5_l3.png "Rendered by QuickLaTeX.com") for
for  .
.
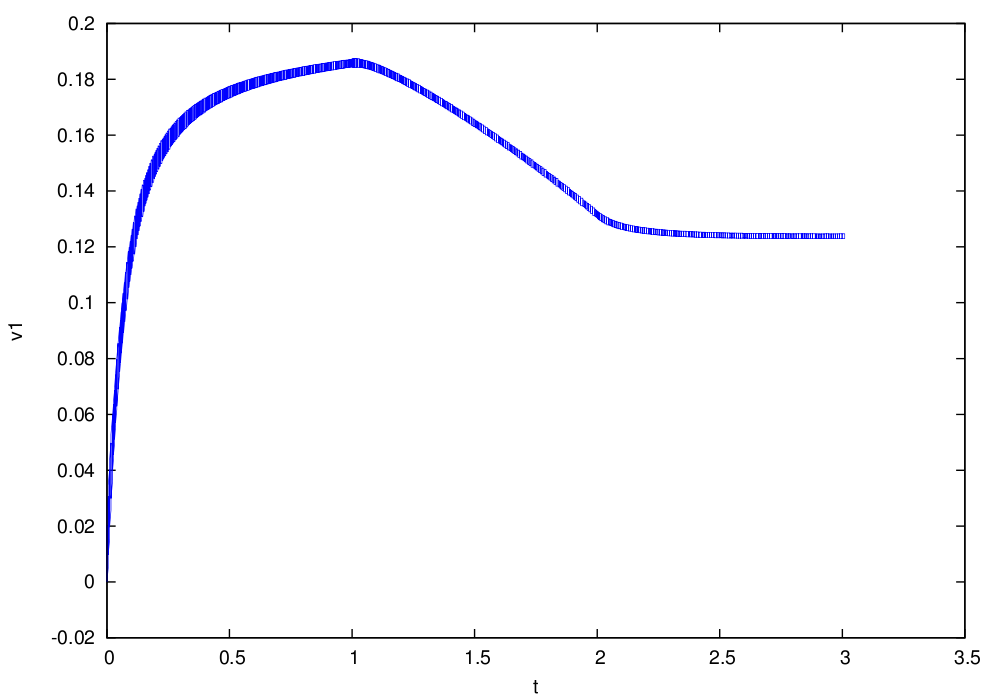
Results
The following figure shows an overapproximation of the reachable set for the case  over the time horizon
over the time horizon ![[0,3]](https://ths.rwth-aachen.de/wp-content/ql-cache/quicklatex.com-25edd378467474e009a002c67e7c2083_l3.png "Rendered by QuickLaTeX.com") computed by Flow*:
computed by Flow*: