Download
| Flow* | lacoperon.model |
Model description
The dynamics of the lac operon model presented in [1] is defined by the following ODE.
![\[ \left\{ \begin{array}{lcl} \dot{I}_i & = & -2 \cdot k_3 \cdot I_i^2 \cdot \frac{k_8\cdot R_i\cdot G^2 + \tau}{k_3\cdot I_i^2 + \mu} + 2\cdot k_{-3} \cdot F_1 \\ & & + \frac{(k_5\cdot I_e - (k_9 + k_{-5})\cdot I_i)\cdot k_{-2}\cdot \chi \cdot k_4 \cdot \eta \cdot (k_3\cdot I_i^2 + \mu)}{k_7\cdot (k_2\cdot (k_8\cdot R_i\cdot G^2 + \tau) + k_{-2}\cdot (k_3\cdot I_i^2 + \mu))} \\ \dot{G} & = & -2\cdot k_8\cdot R_i\cdot G^2 + \frac{2\cdot k_{-8}\cdot (k_8\cdot R_i\cdot G^2 + \tau)}{k_3\cdot I_i^2 + \mu} \\ & & + \frac{k_9\cdot I_i\cdot k_{-2}\cdot \chi \cdot k_4 \cdot \eta \cdot (k_3\cdot I_i^2 + \mu)}{k_7\cdot (k_2\cdot (k_8\cdot R_i\cdot G^2 + \tau) + k_{-2}\cdot (k_3\cdot I_i^2 + \mu))} \end{array} \right. \]](https://ths.rwth-aachen.de/wp-content/ql-cache/quicklatex.com-853c44c04c43bba724990544e38d028a_l3.png "Rendered by QuickLaTeX.com")
wherein the constants are given by
![\[ \begin{array}{llll} k_2 = 4\cdot 10^5, & k_{-2} = 0.03, & k_3 = 0.2, & k_{-3} = 60, \\ k_4 = 1, & k_5 = 0.6, & k_{-5} = 0.006, & k_6 = 3\cdot 10^{-6}, \\ k_7 = 3\cdot 10^{-6}, & k_8 = 0.03, & k_{-8} = 1\cdot 10^{-5}, & k_9 = 5000, \\ R_i = 0.01, & \chi = 0.002002, & \eta = 0.005, & F_1 = 0.0001, \\ I_E = 91100, & \tau = 0.008. \end{array} \]](https://ths.rwth-aachen.de/wp-content/ql-cache/quicklatex.com-d9ef2fe5ae79da03564482ff6a72f424_l3.png "Rendered by QuickLaTeX.com")
Reachability settings
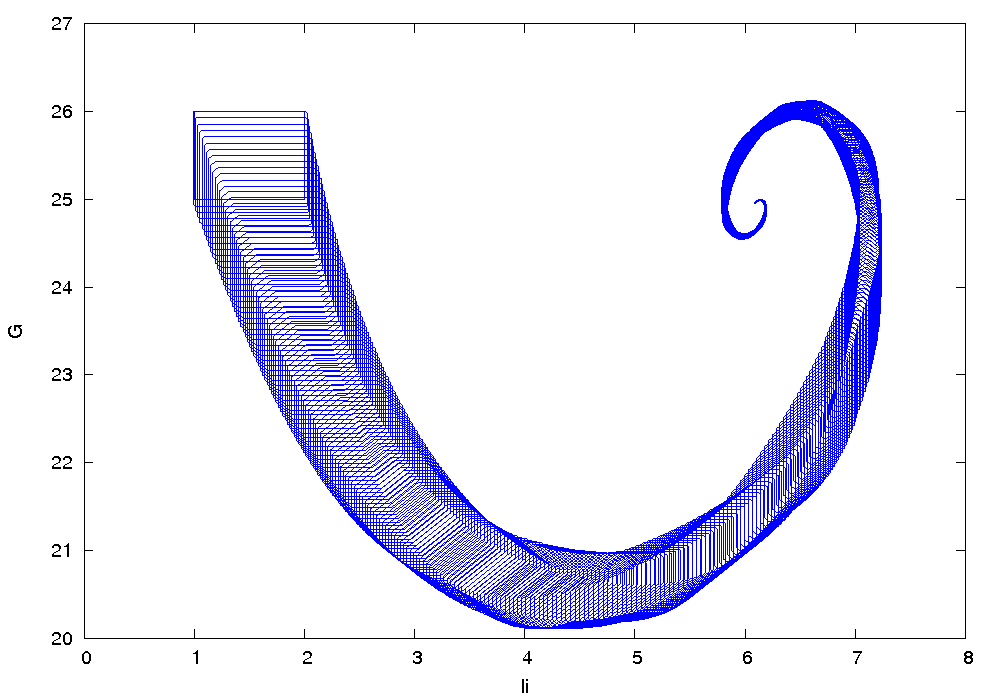
We consider the initial set ![I_i\in [1,2], G\in [25,26]](https://ths.rwth-aachen.de/wp-content/ql-cache/quicklatex.com-366b99c54e0309a15d674be7d64877ca_l3.png "Rendered by QuickLaTeX.com") .
.
Results
The following figure shows an overapproximation computed by Flow* for the time horizon ![[0,150]](https://ths.rwth-aachen.de/wp-content/ql-cache/quicklatex.com-f926317e0968ad78d3ec3f2738423c5f_l3.png "Rendered by QuickLaTeX.com") :
: