Classification
| # of variables | # of modes | # of jumps |
|---|---|---|
| 3 | 6 | 11 |
| Type | Continuous dynamics | Guards & Invariants | Resets |
|---|---|---|---|
| hybrid | linear polynomial | hyperplane & half-space | constant |
Download
| Flow* | cruise_control1.zip |
| SpaceEx | cruise_control.zip |
Model description
This cruise control benchmark was already used in [1] for testing the decompositional stability verification approach. We suggest it here as a benchmark for testing verification tools. It has in particular a service and emergency brakes. The proposed hybrid model takes in addition the braking behavior of the engine under consideration. A detailed description can be found on pages 128, 129 and 130 of [1].
 is the difference between the actual and the desired velocity.
is the difference between the actual and the desired velocity. is the time.
is the time. is an auxiliary variable.
is an auxiliary variable.
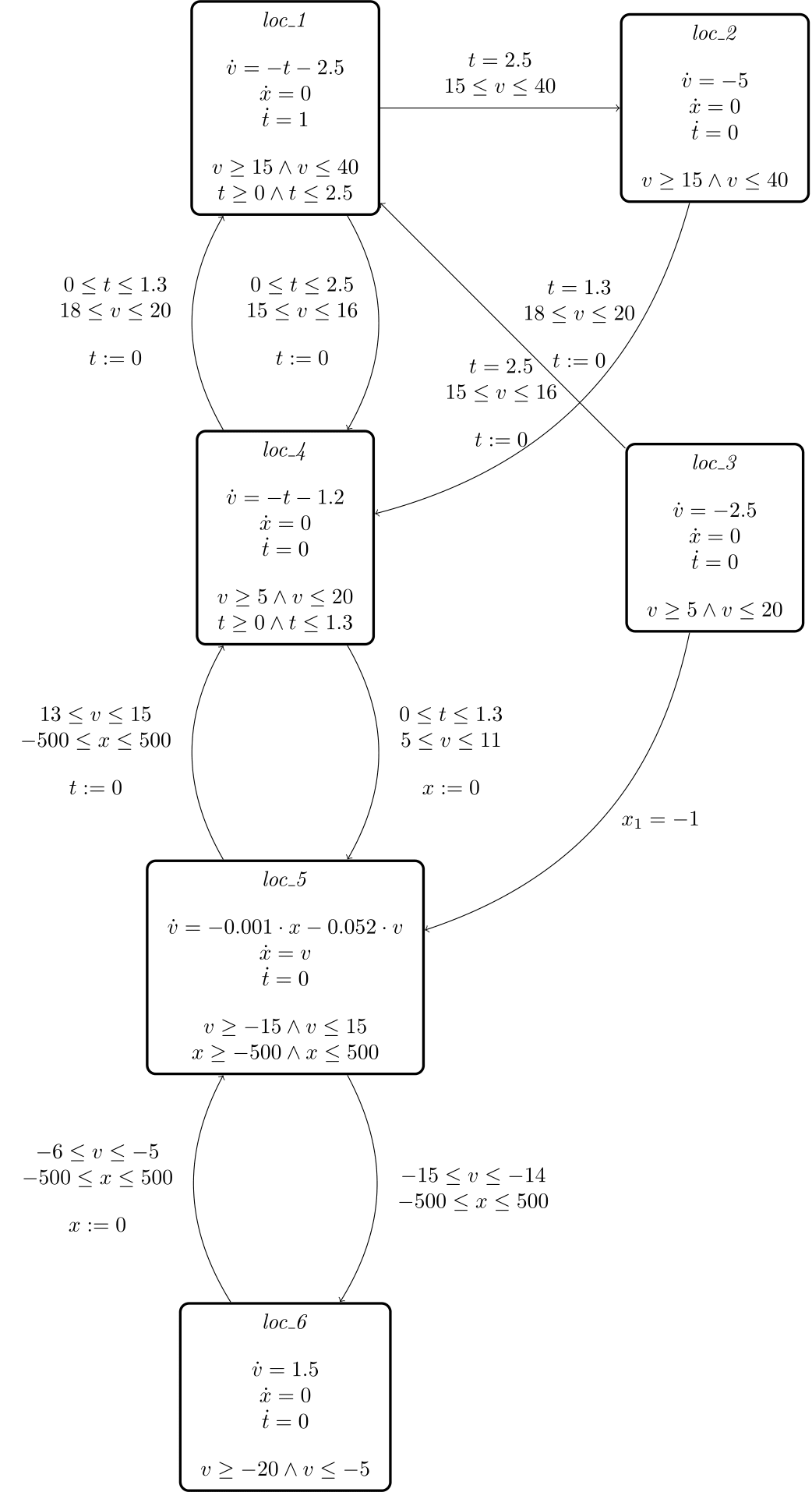
The hybrid automaton of the benchmark:
Reachability settings
As an inital set we use:
![v \in [15,40]](https://ths.rwth-aachen.de/wp-content/ql-cache/quicklatex.com-f46c4352d953f7a140a093d8dbeb087c_l3.png "Rendered by QuickLaTeX.com")
![t \in [0, 2.5]](https://ths.rwth-aachen.de/wp-content/ql-cache/quicklatex.com-214ff893eb5fc4107ebda1099b1cad79_l3.png "Rendered by QuickLaTeX.com")

The initial location is  and the time horizon
and the time horizon  .
.
The bad states are the set of states where  .
.
Alternative initial settings:
 or
or 


Results


